Erst mal möchte ich mich für die lange Funkstille entschuldigen. Berufliches und der eigene Hausumbau fordern leider ihren zeitlichen Tribut. Dafür sind dadurch aber viele neue Themen auf den Tisch gekommen die ich verbloggen will und die euch hoffentlich interessieren.
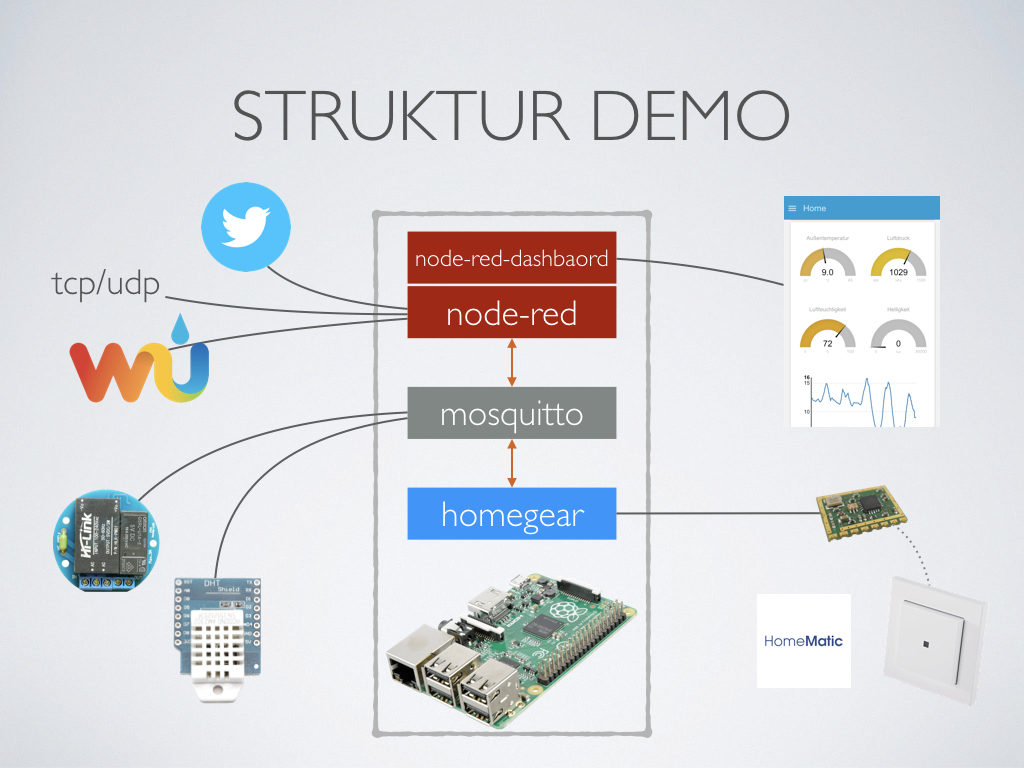
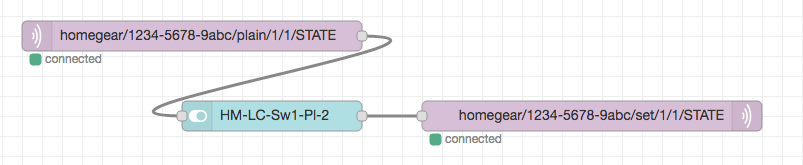
Wie ihr ja wisst, bin ich großer Fan von Homegear. Einerseits weil ich denke, dass Sathya ein wirklich geniales und performantes Stück Software geschaffen hat und andererseits weil ich mit Homegear Geräte transparent in ein anderes Protokoll schieben kann. Dies habe ich mit MQTT in Verbindung mit node-red ja schon mehrfach genutzt.
Also, was ist node-blue?
node-blue ist wie node-red nur anders!
Node-blue ist die Logikengine von Homegear. Von „vorne“ sieht sie aus wie node-red (Editor), im Hintergrund läuft aber eine komplett neu entwickelte C++-Runtime.
Der Vorteil? Man ist nicht an die Begrenzungen gebunden die node.js mitbringt. Unter anderem ist die Verarbeitungsgeschwindigkeit massiv höher und es können mehrere Threads, also auch mehrere CPU-Kerne, verwendet werden.
Die aus node-red bekannten function-nodes werden bei node-blue mit PHP (nativ) oder Python (externer Prozess) programmiert anstatt mit JavaScript. Durch das Multithreading können hängende Nodes node-blue nicht lahmlegen.
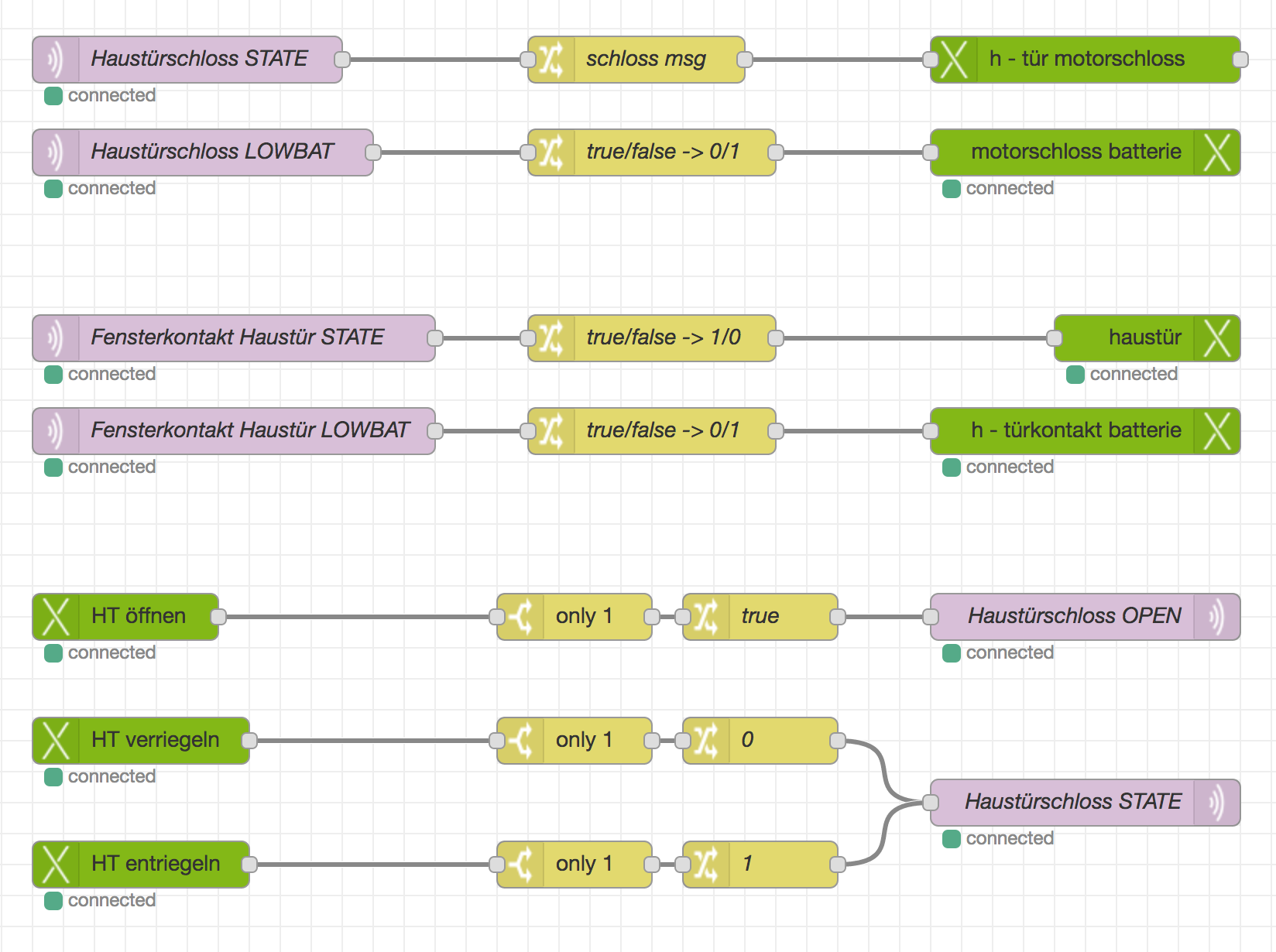
Node-red erlaubt immer nur einen „Eingang“ pro Node und sieht auf direktem Weg keine boolschen Verknüpfungen (AND, OR, etc.) vor. Node-blue bringt eigene Nodes für diese Funktion mit – man kann damit also aus der SPS-Programmierung bekannte Logiken aufbauen ohne auf den eventbasierten Ansatz verzichten zu müssen.
Zusätzlich wurden die Debuginformationen an den Nodes im Editor gegenüber node-red erweitert.
Alle in Homegear bekannten Geräte und deren Variablen lassen sich einfach über einen node (variable-in) in den Flow übernehmen und werden bei Auftreten verarbeitet – also genauso wie bei node-red, nur dass hier nicht der Umweg über eine Schnittstelle (MQTT, WebSocket, etc.) oder einen zusätzlichen Node (Hue, API-x, etc.) genutzt werden muss.
Gleiches gilt für die Ausgabe von Werten über den variable-out-node.
But wait, there’s more!
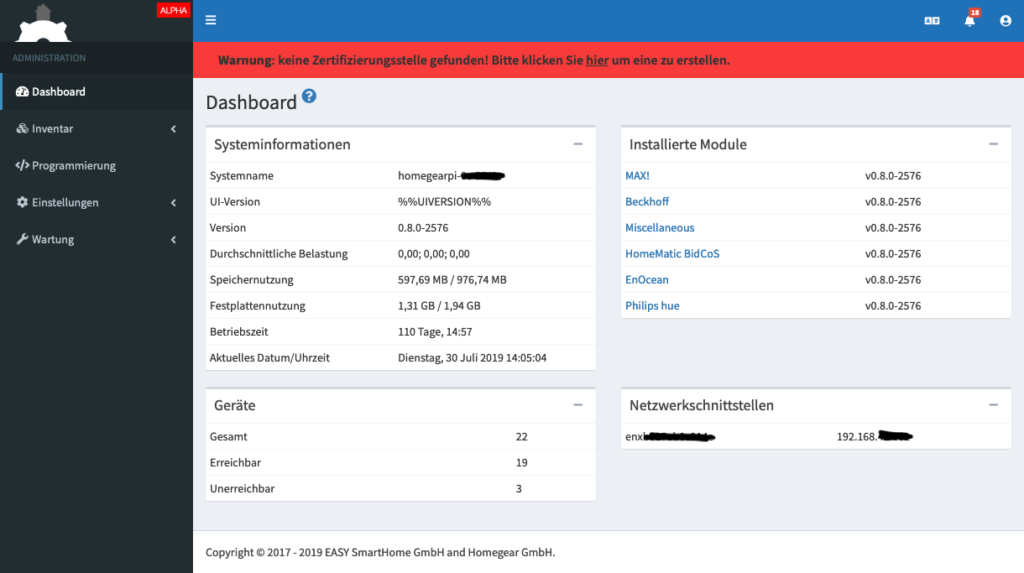
Seit Version 0.7.30 bringt Homegear ein eigenes Admininterface mit (http://<ip-host-homegear>:2001/admin/). Darüber lassen sich Geräte nun endlich logisch ordnen – also in Räume, Gruppen und Stockwerke einteilen, neue Geräte anlernen und verschiedene Wartungs- und Einstellungsaufgaben ausführen.
Über den Menüpunkt „Programmierung“ landet man dann auch schon direkt im node-blue Editor (http://<ip-host-homegear>:2001/node-blue/).
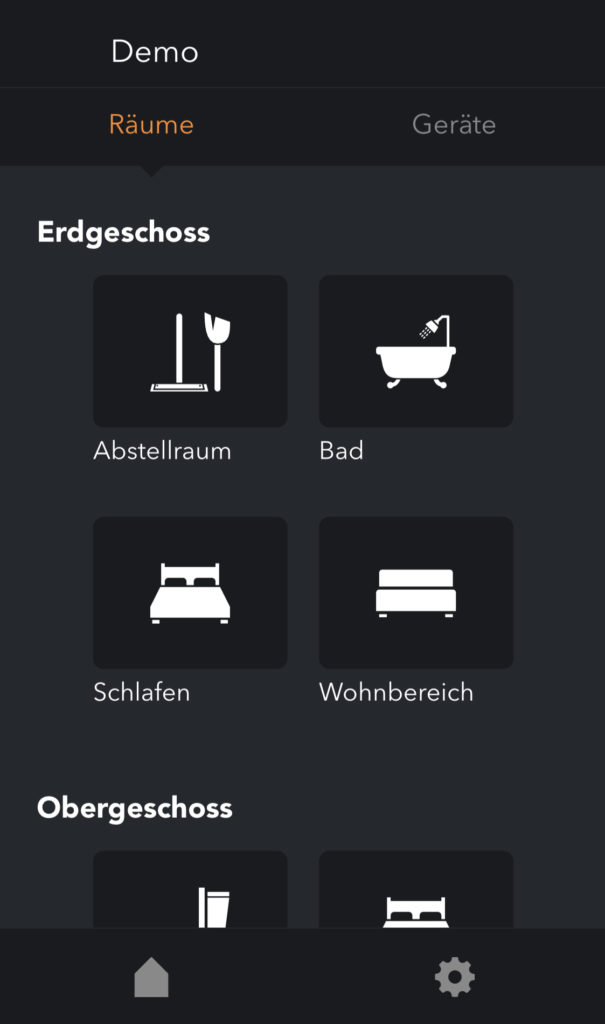
Außerdem ist ein Userinterface zur Bedienung in der Entwicklung, das man schon unter https://test.homegear.eu ausprobieren kann.
Eine erste Version kann über das Paket homegear-ui
Die Oberfäche wurde zusammen mit der Hochschule Furtwangen entwickelt und macht einen sehr guten Eindruck. Ich bin gespannt wie die vielen Gerätetypen abgebildet und bedient werden.
Ein Programmierbeispiel
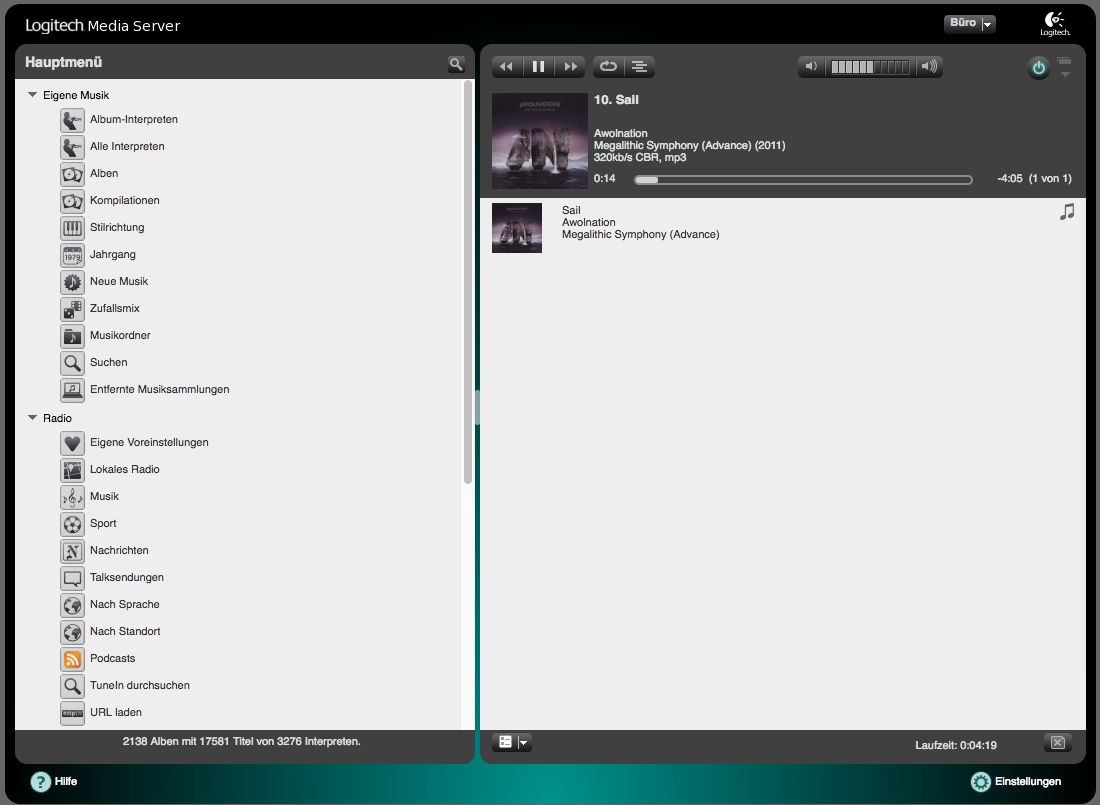
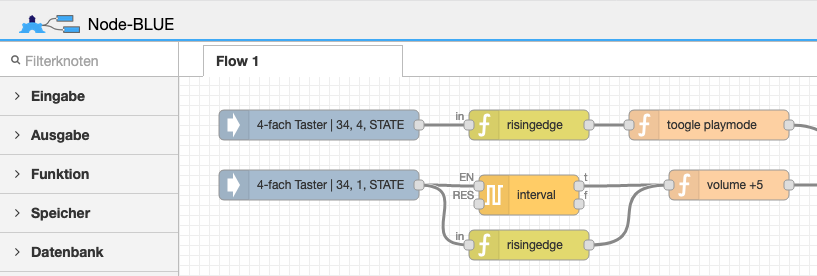
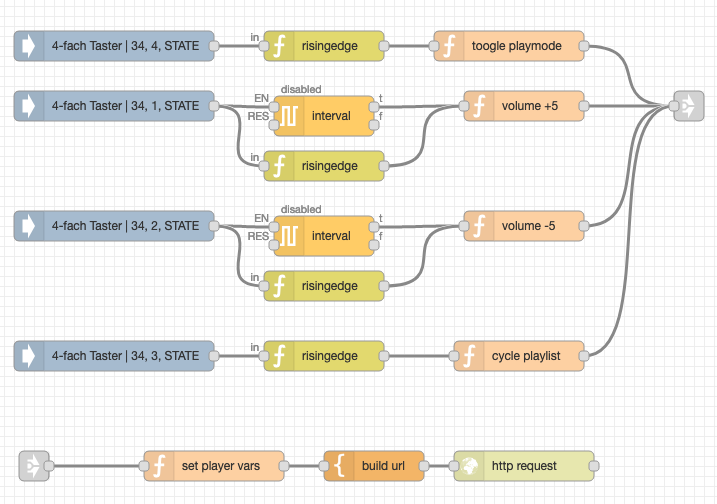
Um mal ein bisschen in node-blue einzusteigen, habe ich eine simple Musiksteuerung für meinen Logitechmediaserver programmiert. Unser WLan-Radio im Bad hatte sowieso gerade den Geist aufgegeben und so kam mein portabler Squeezebox-Player zum Einsatz.
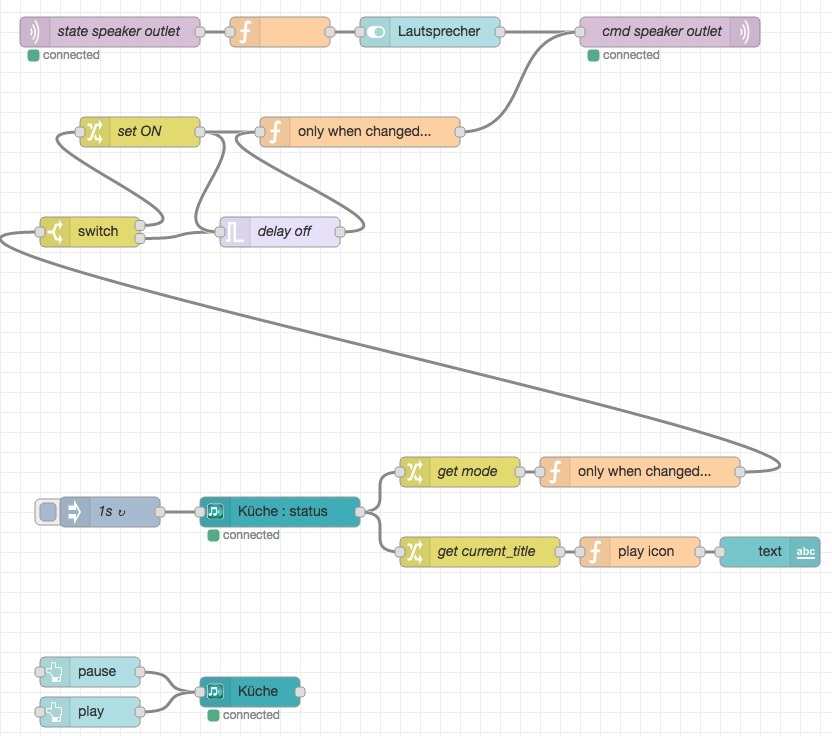
Als Grundlage habe ich mir ein Beispiel von Job aus dem Homegear-Forum genommen und ein wenig erweitert. Der Flow sendet nach entsprechender Verarbeitung einfach die gewollten Kommandos per HTTP an den Server.
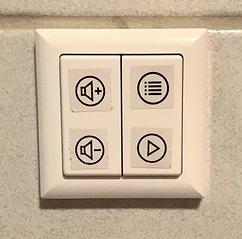
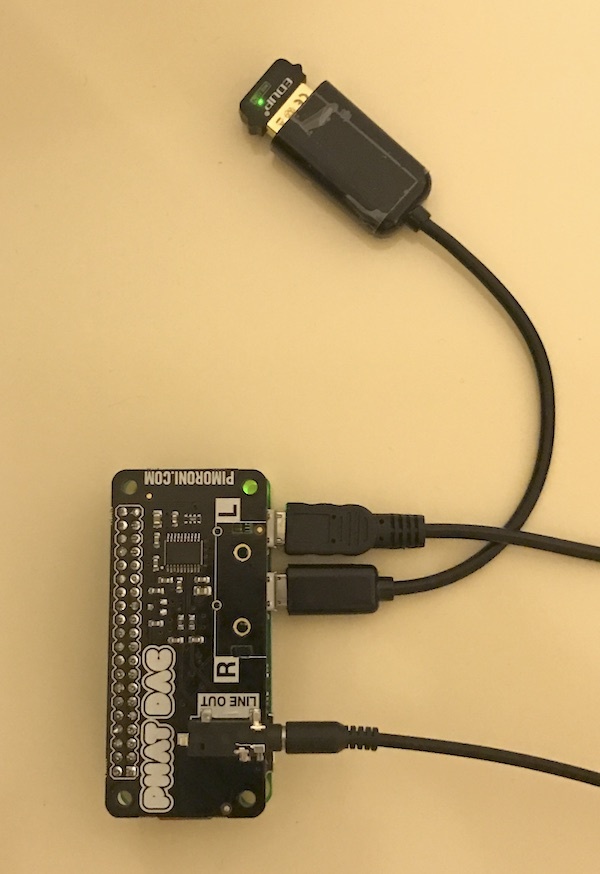
Zur Steuerung wird ein 4-fach EnOcean-Taster genutzt, der über einen USB300-USB-Stick an meine RaspberryPi hängt auf dem Homegear läuft. Die Taster benötigen keine Batterien und passen sich recht gut ins vorhandene Schalterprogramm ein.
Das Anlernen erfolgt als Rocker-Switch und ist mit der richtigen EEP kein Problem. Danach stehen unter der entsprechenden Geräte-ID die Kanäle des Schalters in Homegear/node-blue zur Verfügung.
Ein Taster liefert true solange er gedrückt ist, sowie man ihn loslässt wird ein false gesendet. Mit den entsprechenden node-blue nodes kann man so eine einfache Steuerung realisieren und auch das Halten der Taste auswerten.
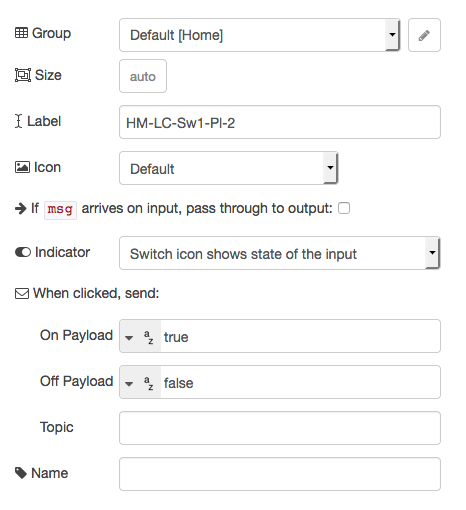
Die Programmierung in den function-nodes ist eher simpel. Es werden nur ein paar Variablen gesetzt, die dann im unteren Teil des Flows in eine URL umgewandelt und gesendet werden.
Mit dem Playlist-Button (oben rechts) kann man durch die im cycle-playlist-node hinterlegte Liste von Streaming-URL’s schalten.
Eine Verbesserung die ich noch plane ist, dass man bei Doppelklick auf diesen Taster zum ersten Eintrag in der Playlist springt. Node-blue bringt für solch eine Funktion schon einen eigenen Node mit.
Es ist nicht immer leicht den Sender zu „erraten“ den man gerade hört und eine visuelle Ausgabe fehlt mir gerade 😉
Der komplette Flow ist im oben verlinkten Homegear-Forum-Thread zu bekommen.
Wichtig: Leßt bitte in jedem Fall die Info der einzelnen nodes. Die Doku ist zugegebenermaßen noch etwas dünn, das Wichtigste was man zum Verständnis braucht, steht aber dort.
Fazit
Node-blue ist unheimlich schnell und die Programmierung geht – nach etwas Eingewöhnung – fast schneller von der Hand als bei node-red. Das ist vor allem der vorhandenen boolschen Logik-Engine zu verdanken. Man muss, wie bei allem was man neu anfängt, erst mal seinen Kopf dazu bekommen in den neuen Strukturen zu denken.
Nachteil an node-blue ist die aktuell dünne Dokumentation und die nicht wie von node-red gewohnte node-Vielfalt. Mit homegear-nodes-optional gibt es schon ein paar Erweiterungen, diese kommen an Vielfalt aber natürlich nicht an die schiere Masse bei node-red ran.
Hier gilt auch wieder der Open-Source-Gedanke: Wer mitmacht und vielleicht sogar eigene Nodes oder Dokumentation erzeugt, hilft allen die node-blue benutzen.
Homegear wird aktuell an allen Stellen weiterentwickelt und wird immer mehr zu dem, was man auch als nicht so technisch versierter Anwender gebrauchen kann. Die Einstiegshürde – auch zur Programmierung – wird immer niedriger.
Update
Die Weiterentwicklung des Flows zur Logitech-Mediaserver-Steuerung könnt ihr im Homegear-Forum verfolgen: https://forum.homegear.eu/t/flow-squeezebox/2664/7